Rangkaian dan Program sistem minimum 8086
.INTERFACE RUNNING LED MENGGUNAKAN MIKROPROSESOR 8086
1. Tujuan [Kembali]
Mempelajari bagaimana cara interface LED menggunakan Mikroprosesor 8086 dan cara kerjanya serta programmnya.
2. Alat dan Bahan [kembali]
2.1 Mikroprosesor 8086.


2.2 LED

2.3 Reisistor

3. Dasar Teori [kembali]
3.1. Mikroprosesor 8086
Mikroprosesor atau CPU adalah “otak” yang merupakan pengendali utama
semua operasi dalam sistem komputer. Mikroprosesor mengambil instruksi
biner dari memori, menerjemahkannya menjadi serangkaian aksi dan
menjalankannya. Aksi tersebut bisa berupa transfer data dari dan ke
memori, operasi aritmatika dan logika, atau pembangkitan sinyal kendali.
Intel 8086 adalah mikroprosesor 16 bit, di mana dia dapat bekerja
secara internal menggunakan operasi 16 bit dan secara eksternal dapat
mentransfer data 16 bit melalui bus data.
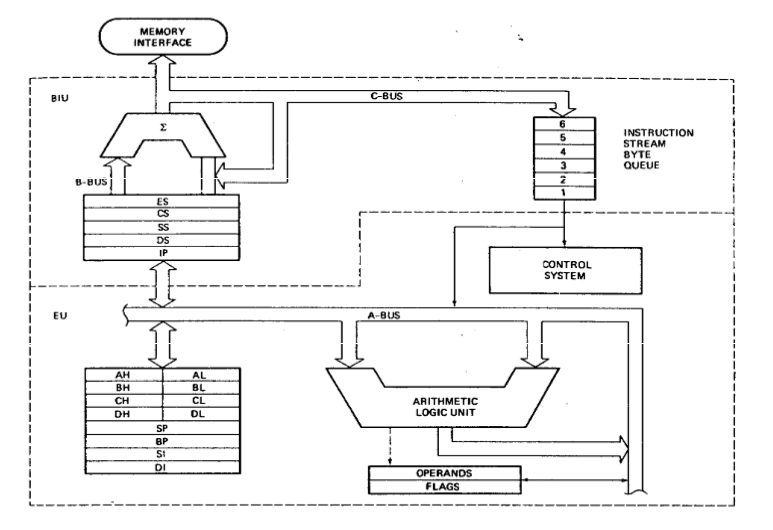
3.1.1 Arsitektur Mikroprosesor 8086
Prosesor 8086 dapat dihubungkan dengan bus alamat yang berukuran 20 bit,
sehingga mampu mengalamati memori maksimal 220 = 1.048.576 byte (1 MB).
Diagram blok arsitektur 8086 dapat dilihat pada Gambar . Mikroprosesor
8086 terbagi atas 2 unit, yaitu unit antarmuka bus (bus interface unit,
BIU) dan unit pengeksekusi (execution unit, EU).
 Unit Antarmuka Bus (BIU)
Unit Antarmuka Bus (BIU)
Unit ini merupakan bagian yang berhubungan langsung dengan “pihak luar”: bus alamat dan bus data. BIU mengirim alamat ke bus alamat, mengambil instruksi (fetch) dari memori, membaca data dari port dan memori, serta menulis data ke port dan memori (menangani transfer data antara bus dan unit eksekusi).
BIU tersusun atas:
Unit ini merupakan bagian yang berhubungan langsung dengan “pihak luar”: bus alamat dan bus data. BIU mengirim alamat ke bus alamat, mengambil instruksi (fetch) dari memori, membaca data dari port dan memori, serta menulis data ke port dan memori (menangani transfer data antara bus dan unit eksekusi).
BIU tersusun atas:
1. Instruction Stream Byte Queue (ISBQ).
BIU memfetch instruksi dari memori sebanyak-banyaknya 6 buah instruksi ke depan. Hal ini dilakukan agar eksekusi progam menjadi lebih cepat. Instruksi yang sudah diambil ini ditaruh di ISBQ yang berupa 6 buah register first-in-first-out. BIU dapat melakukan fetching selagi EU menerjemahkan dan mengeksekusi instruksi yang tidak membutuhkan penggunaan bus (misalnya operasi matematis menggunakan register internal). Ketika EU selesai melaksanakan suatu instruksi, maka dia tinggal mengambil perintah berikutnya di ISBQ, tanpa harus mengirim alamat ke memori untuk mengambil instruksi berikutnya, sehingga eksekusi akan lebih cepat. Kegiatan fetching instruksi berikutnya selagi menjalankan suatu instruksi disebut sebagai: pipelining. Pada mikroprosesor yang lebih baru, ukuran ISBQ tidak hanya 6 byte tetapi mencapai 512 byte, ini efektif untuk program yang mempunyai banyak kalang (struktur program yang berulang).
2. Register segmen.
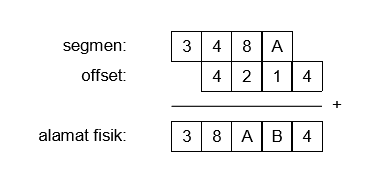
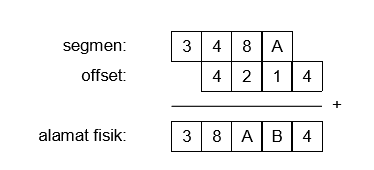
BIU berisi 4 buah register segmen 16 bit, yaitu: code segment (CS), data segment (DS), extra segment (ES), dan stack segment (SS). Sistem komputer 8086 mempunyai bus alamat 20 bit, tetapi ukuran register - termasuk register alamat (memory address register) – yang dimilikinya hanya 16 bit, lantas bagaimana cara mengatasinya. Cara pemberian alamat 20 bit dilakukan menggunakan 2 komponen alamat: segmen dan offset, yang masing-masing berukuran 16 bit. BIU akan menggeser ke kiri nilai segmen sebanyak 4 bit (mengalikan dengan 16), kemudian menambahkan offset untuk memperoleh alamat fisik memori yang dikirimkan melalui bus alamat. Untuk lebih jelasnya, diberi contoh untuk memberi alamat fisik $38AB4( ) 3 , segmen dapat diisi dengan angka $348A, dan offset diisi dengan angka $4214, lihat Gambar. Cara penulisan kombinasi segmen dan offset adalah:
segment:offset
Sehingga untuk contoh ini, penulisannya adalah $348A:$4214. Perlu diingat bahwa kita bisa menggunakan kombinasi nilai segmen dan offset yang bervariasi untuk memberi alamat fisik yang sama, misalnya $38AB:$0004, $3800:$0AB4, dsb.
 Secara umum, suatu program terdiri atas 4 bagian: segmen code yang
berisi instruksi; segmen data, berisi data yang telah dialokasikan
sebelumnya (statik); segmen ekstra, untuk variabel dinamik; serta segmen
stack yang dipakai untuk menyimpan informasi pada saat pemanggilan
subrutin. Informasi segmen disimpan dalam keempat register segmen sesuai
dengan namanya.
Secara umum, suatu program terdiri atas 4 bagian: segmen code yang
berisi instruksi; segmen data, berisi data yang telah dialokasikan
sebelumnya (statik); segmen ekstra, untuk variabel dinamik; serta segmen
stack yang dipakai untuk menyimpan informasi pada saat pemanggilan
subrutin. Informasi segmen disimpan dalam keempat register segmen sesuai
dengan namanya.
BIU memfetch instruksi dari memori sebanyak-banyaknya 6 buah instruksi ke depan. Hal ini dilakukan agar eksekusi progam menjadi lebih cepat. Instruksi yang sudah diambil ini ditaruh di ISBQ yang berupa 6 buah register first-in-first-out. BIU dapat melakukan fetching selagi EU menerjemahkan dan mengeksekusi instruksi yang tidak membutuhkan penggunaan bus (misalnya operasi matematis menggunakan register internal). Ketika EU selesai melaksanakan suatu instruksi, maka dia tinggal mengambil perintah berikutnya di ISBQ, tanpa harus mengirim alamat ke memori untuk mengambil instruksi berikutnya, sehingga eksekusi akan lebih cepat. Kegiatan fetching instruksi berikutnya selagi menjalankan suatu instruksi disebut sebagai: pipelining. Pada mikroprosesor yang lebih baru, ukuran ISBQ tidak hanya 6 byte tetapi mencapai 512 byte, ini efektif untuk program yang mempunyai banyak kalang (struktur program yang berulang).
2. Register segmen.
BIU berisi 4 buah register segmen 16 bit, yaitu: code segment (CS), data segment (DS), extra segment (ES), dan stack segment (SS). Sistem komputer 8086 mempunyai bus alamat 20 bit, tetapi ukuran register - termasuk register alamat (memory address register) – yang dimilikinya hanya 16 bit, lantas bagaimana cara mengatasinya. Cara pemberian alamat 20 bit dilakukan menggunakan 2 komponen alamat: segmen dan offset, yang masing-masing berukuran 16 bit. BIU akan menggeser ke kiri nilai segmen sebanyak 4 bit (mengalikan dengan 16), kemudian menambahkan offset untuk memperoleh alamat fisik memori yang dikirimkan melalui bus alamat. Untuk lebih jelasnya, diberi contoh untuk memberi alamat fisik $38AB4( ) 3 , segmen dapat diisi dengan angka $348A, dan offset diisi dengan angka $4214, lihat Gambar. Cara penulisan kombinasi segmen dan offset adalah:
Sehingga untuk contoh ini, penulisannya adalah $348A:$4214. Perlu diingat bahwa kita bisa menggunakan kombinasi nilai segmen dan offset yang bervariasi untuk memberi alamat fisik yang sama, misalnya $38AB:$0004, $3800:$0AB4, dsb.
3. Instruction Pointer (IP)
adalah register berisi informasi offset yang bersama-sama CS menunjuk posisi dalam memori di mana instruksi berikutnya berada.
Unit Eksekusi (EU)
Unit ini memberitahu BIU di mana mengambil instruksi dan data, menerjemahkan kode instruksi, dan menjalankannya. EU tersusun atas:
1. Dekoder instruksi
, yang mengambil urut-urutan instruksi dari ISBQ kemudian menerjemahkannya ke runtutan aksi yang harus dikerjakan oleh EU.
2. Sistem kontrol
, merupakan rangkaian yang mengendalikan kerja mikroprosesor berdasarkan instruksi yang telah diterjemahkan oleh dekoder instruksi tadi.
3. Arithmetic Logic Unit (ALU)
, yaitu bagian dari mikroprosesor yang dapat melakukan operasi matematis (misalnya operasi penjumlahan, pengurangan, perkalian, dan pembagian) dan logika (misalnya operasi AND, OR, XOR, geser, dan rotasi) 16 bit.
4. Register flag (bendera)
, yaitu register flip-flop 16 bit yang menunjukkan kondisi yang dihasilkan oleh eksekusi suatu operasi oleh EU. Selain itu flag juga mengatur beberapa operasi tertentu. Terdapat 9 flag dalam register flag 8086, seperti terlihat pada Gambar


Sebanyak 6 buah flag merupakan flag kondisi yang menunjukkan keadaan setelah eksekusi suatu instruksi, yaitu: Carry Flag (CF), Parity Flag (PF), Auxiliary Carry Flag (AF), Zero Flag (ZF), Sign Flag (SF), dan Overflow Flag (OF). Sedangkan, 3 buah flag sisanya berupa flag kontrol yang mengendalikan operasi tertentu, yaitu: Single Step Trap Flag (TF), Interrupt Flag (IF), dan String Direction Flag (DF).
5. Register serbaguna
, merupakan register yang dapat digunakan untuk menyimpan data yang akan diolah atau hasil suatu operasi oleh ALU. Terdiri atas 8 buah register 8 bit, yaitu AH, AL, BH, BL, CH, CL, DH, dan DL. Register-register ini juga dapat digunakan secara berpasangan sehingga membentuk register 16 bit, yaitu; AX (gabungan dari AH dan AL), BX, CX, dan DX. AX biasanya digunakan untuk menyimpan hasil operasi, sehingga disebut akumulator. CX biasanya digunakan untuk pencacah untuk keperluan perulangan/kalang (loop), sehingga disebut counter. BX dan DX biasanya digunakan sebagai offset dari alamat data di memori (dengan segmen DS).
6. Register pointer dan indeks
, terdiri atas Stack Pointer (SP), Base Pointer (BP), Source Index (SI), dan Destination Index (DI). Stack (tumpukan) adalah bagian dari memori yang digunakan untuk menyimpan informasi alamat program yang ditinggalkan pada saat terjadi pemanggilan subrutin/subprogram. Demikian juga apabila subrutin tersebut berupa fungsi yang menggunakan parameter, maka data parameter akan disimpan pula di stack. Alamat tumpukan terluar dari stack ditunjuk oleh SS:SP. Sedangkan BP digunakan sebagai offset yang menunjuk ke parameter-parameter fungsi yang dipanggil. SI dan DI biasanya digunakan sebagai offset (masing-masing berpasangan dengan ES dan DS) yang menunjuk ke suatu variabel/data untuk operasi string (larik data).
3.1.2 Bahasa Mesin dan Bahasa Assembly
Instruksi yang difetch dari memori untuk kemudian diseksekusi oleh
mikroprosesor berformat biner (kombinasi angka 0 dan 1), yang disebut
bahasa mesin. Sebagai contoh, perintah untuk memindahkan data dalam
register BX ke register CX adalah 10001011 11001011 ($8B CB), sedangkan
bahasa mesin untuk menjumlahkan data dalam register AL dengan angka 7
adalah 00000100 00000111 ($04 07), dan perintah membaca dari port 5
diberikan dengan 11100100 00000101 ($E4 05).
Seperti terlihat pada ketiga contoh di atas, bahasa mesin tidak mudah untuk dimengerti dan dihapalkan oleh seorang programer, apalagi jumlah instruksi yang tersedia berkisar ribuan perintah. Di samping itu, akan mudah sekali terjadi kesalahan ketika menuliskan angka-angka biner yang tersusun atas angka 0 dan 1 yang banyak sekali. Oleh karena itu biasanya kita tidak memprogram komputer langsung dalam bahasa mesin, namun dalam bahasa assembly.
Dalam bahasa assembly, setiap instruksi diberi kata (mnemonic) yang sesuai dengan maksud perintah itu, sehingga dapat membantu pemrogram dalam mengingat instruksi kepada mikroprosesor tersebut. Kata yang dipakai biasanya berupa singkatan atau beberapa huruf awal dari kata dalam bahasa Inggris untuk perintah tersebut. Misalnya, mnemonic untuk perintah penjumlahan adalah ADD, untuk perintah pengurangan adalah SUB (dari kata subtract), dan untuk memindahkan data( ) 4 dari suatu register atau memori ke lokasi lain adalah MOV (dari kata move). Sebagian besar instruksi terdiri atas mnemonic dan operand yang merupakan parameter dari instruksi tersebut, yang dituliskan di belakang mnemonic tersebut. Contoh bahasa assembly dari perintah-perintah dengan bahasa mesin di atas diberikan dalam Tabel

Seperti terlihat pada ketiga contoh di atas, bahasa mesin tidak mudah untuk dimengerti dan dihapalkan oleh seorang programer, apalagi jumlah instruksi yang tersedia berkisar ribuan perintah. Di samping itu, akan mudah sekali terjadi kesalahan ketika menuliskan angka-angka biner yang tersusun atas angka 0 dan 1 yang banyak sekali. Oleh karena itu biasanya kita tidak memprogram komputer langsung dalam bahasa mesin, namun dalam bahasa assembly.
Dalam bahasa assembly, setiap instruksi diberi kata (mnemonic) yang sesuai dengan maksud perintah itu, sehingga dapat membantu pemrogram dalam mengingat instruksi kepada mikroprosesor tersebut. Kata yang dipakai biasanya berupa singkatan atau beberapa huruf awal dari kata dalam bahasa Inggris untuk perintah tersebut. Misalnya, mnemonic untuk perintah penjumlahan adalah ADD, untuk perintah pengurangan adalah SUB (dari kata subtract), dan untuk memindahkan data( ) 4 dari suatu register atau memori ke lokasi lain adalah MOV (dari kata move). Sebagian besar instruksi terdiri atas mnemonic dan operand yang merupakan parameter dari instruksi tersebut, yang dituliskan di belakang mnemonic tersebut. Contoh bahasa assembly dari perintah-perintah dengan bahasa mesin di atas diberikan dalam Tabel

3.1.3 Pin Diagram Mikroprosessor 8086

Terdapat juga pin-pin untuk catu daya yang disuplaikan, yaitu VCC dan GND, masing-masing untuk tegangan catu daya dan pentanahan. Untuk dapat bekerja, selain membutuhkan catu daya, mikroprosesor 8086 juga memerlukan sinyal detak (clock) secara eksternal dengan frekuensi sampai 10 MHz. Sinyal clock ini dilewatkan ke pin CLK yang ada pada kaki nomor 19.
Pin-pin lainnya digunakan untuk sinyal kendali. Mikroprosesor 8086 dapat digunakan dalam 2 mode, minimum dan maksimum, yang masing-masing menggunakan pin kendali secara berbeda. Mode ini ditentukan dengan memberi nilai pada pin MXMN/ ( ) 1 , nilai 1 (dihubungkan dengan Vcc) untuk mode minimum dan nilai 0 (ditanahkan) untuk mode maksimum. Kebanyakan aplikasi menggunakan mode minimum. Pada mode ini, nama pin yang dipakai pada kaki nomor 24 sampai dengan 31 adalah yang berada di dalam tanda kurung (sebelah kanan)
Sinyal RESET digunakan untuk memerintah mikroprosesor agar melakukan inisialisasi dengan cara memberi nilai 0 pada register DS, SS, ES, IP, dan flag; serta nilai $FFFF untuk CS( ) 2 . Pin INTR dan NMI digunakan untuk menginterupsi kerja mikroprosesor. Jika ada sinyal pada kedua pin itu, maka mikroprossor akan menghentikan eksekusi program yang sedang dijalankannya, kemudian menjalankan subrutin sesuai yang dikehendaki, dan setelah selesai kembali ke tempat semula di mana program diinterupsi. Sinyal INTR (interrupt) berupa permintaan untuk melakukan interupsi yang dapat dianulir /tidak dipenuhi jika flag IF direset, sedangkan sinyal NMI (non maskable interrupt) tidak dapat ditutup/ditolak, artinya interupsi harus dilakukan. Pin INTA (interrupt acknowledge) digunakan oleh mikroprosesor untuk menjawab bahwa permintaan interupsi dari sinyal INTR dapat diterima/dijalankan
Pin IO M/ (memory/IO), RD (read), dan WR (write) digunakan untuk mengendalikan memori dan port pada saat pemindahan data. Sinyal IO M/ digunakan untuk memilih apakah memori atau port yang akan diakses oleh mikroprosesor. Jika hendak menghubungi memori, maka mikroprosesor memberi nilai tinggi (1) pada sinyal ini dan jika port yang hendak diakses maka sinyal ini diberi nilai rendah (0). Sinyal RD akan diaktifkan (bernilai rendah) jika operasi yang dilakukan adalah membaca, yaitu transfer data dari memori/port ke mikroprosesor. Sementara sinyal WR digunakan untuk menulis, tranfer data dari mikroprosesor ke memori/port, jika aktif. Sinyal-sinyal lain adalah R DT/ (data transmit/receive), DEN (data enable), ALE (address latch enable), dan BHE (bus high enable) yang akan dibahas kemudian.
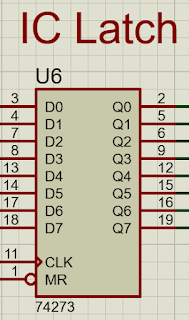
3.2. IC Latch 74273
Untuk menghubungkan address ke memori atau I-O maka diperlukan pemisahan
address rendah yang multiplek dengan data dengan memakai rangkaian
latch. Rangkaian latch akan selalu aktif dengan terhubungnya ke ground
kaki LE maka untuk bekerjanya IC latch ini diperlukan sinyal kontrol
yang di-input-kan ke kaki –OE. Pin -OE mendapat input dari pin ALE yang
merupakan sinyal kontrol yang artinya pin ini akan aktif setiap
mikroprosesor meng-output-kan address.

3.3. IC Decoder 74154
IC 74154 merupakan salah satu keluarga TTL yang dimana fungsi dari IC
ini adalah sebagai dekoder/demultiplexter 4-16 saluran. Tiap decoder
4-saluran-ke 16-saluran monolit ini menerapkan rangkaian TTL untuk
mengubah 4 input biner menjadi 16 jalur keluar, bila kedua input E1 dan
E2 adalah rendah. Setiap komponen I-O harus diberi address. Misalkan,
ada tiga komponen I-O yang yaitu PPI 8255, PIT 8253 dan PIC 8259 seperti
maka untuk membedakannya dapat dibuatkan rangkaian decoder dengan
memakai IC decoder 74154 yang keluarannya ada 16 .

3.4. PPI (Programmable Pheriperal Interface)
Untuk hubungan input-output, mikroprosesor memerlukan suatu rangkaian
interface. Interface menggunakan IC Programmable Peripheral Interface
(PPI) 8255 yang mempunyai 3 port dengan masing-masing berkapasitas
8-bit. Jika dalam merancang sistem minimum 8088 ternyata memerlukan
interface lebih dari 3 port maka dapat ditambahkan IC PPI 8255 sesuai
kebutuhan dengan menambahkan rangkaian decoder-nya


3.5. Pengertian LED
Light Emitting Diode atau sering disingkat dengan LED adalah komponen
elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan
tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan
semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung
pada jenis bahan semikonduktor yang dipergunakannya.
4. Gambar rangkaian [kembali]

Prinsip kerja dari rangkaian di atas adalah, ketika diaktifkan,
mikroproseor akan membuat LED bergrak dari kiri ke kanan, kemudian kanan
ke kiri, begitu seterusnya. Prinsipnya, pertama mikrokontroler
mengirimkan alamat untuk mengakses I/O IC 8255 melewati A0-A15, kemudian
masuk ke IC 74273 D0-D7. Alamat tersebut akan dilewatkan dari D0-D7 ke
Q0-Q7 apabila sinyal kontrol alih dikeluarkan oleh pin ALE mikroprosesor
dan diinverterkan sebelum diumpankan ke CLK IC 74273. Apabila telah
aktif sinyal CLK, maka alamat akan ditahan di Q0-Q7 IC 74273. kemudian
jika Q1-Q5 IC 74273 yang membawa alamat dari AD9-AD11 dihubungkan dengan
decoder 74154. maka ketika nilai AD9-AD11 ini berlogika 0 semua dan E1
E1 IC ini juga berlogika 0, maka pin 0 IC 75154 akan berlogika nol yang
kemudian pin ini dihubingkan dengan CS pada IC 8255. sehingga alamat
yang dikirimkan adalah untuk akses IC 8255.<br>
Kemudian untuk mengirim data dari Mikroprosesor 8086 ke IC I/O 8255,
pin AD0-AD7 mikroprosesor dihubungkan dengan pin D0-D7 IC 8255. PORTA
IC 8255 menjadi output bagi mikroprosesor untuk kemudian dihubungkan
dengan 4 buah LED yang akan digerakkan dari kiri ke kanan dan kembali
lagi ke kiri dengan settingan program di bawah ini.
5. Listing Program [kembali]
CODE_SEG SEGMENT ;
code_seg sebagai segment
ASSUME
CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H ; program
ditulis mulai origin 100h
start: jmp mulai ;
Awal program pada Org 0100H
porta equ 00h ;
Menentukan alamat port A,B,C
portb equ 01h ; dan ctrlword
sesuai dengan
portc equ 02h ;
hardwarenya
cw equ 03h
mulai:
; TEMPAT
PROGRAM UTAMA
putar:
jmp putar
delay proc near ;
Procedure delay
push cx ; simpan cx
mov cx,02fffh ; isi
cx dengan lama delay
loop $ ; loopng
sampai cx=0
pop cx ; keluarkan cx
ret ; kembali ke
program utama
delay endp ; akhir
procedure delay
; KHUSUS UNTUK EPROM
2764 ATAU 2864
ORG 20F0H ; alamat
yang dituju setelah reset
DB 0EAH ; JMP reset
ke
DW 0100H ; alamat
offset 0100h
DW 0FDF0H ; alamat
segmen 0FDFh
CODE_SEG ENDS ; batas
segment code_seg
END START ; akhir program
6. Flowchart [kembali]











{kind=link}